Course
UTIAS — AER1211H Human Control of Flight Systems, Fall 2024.
What it was about
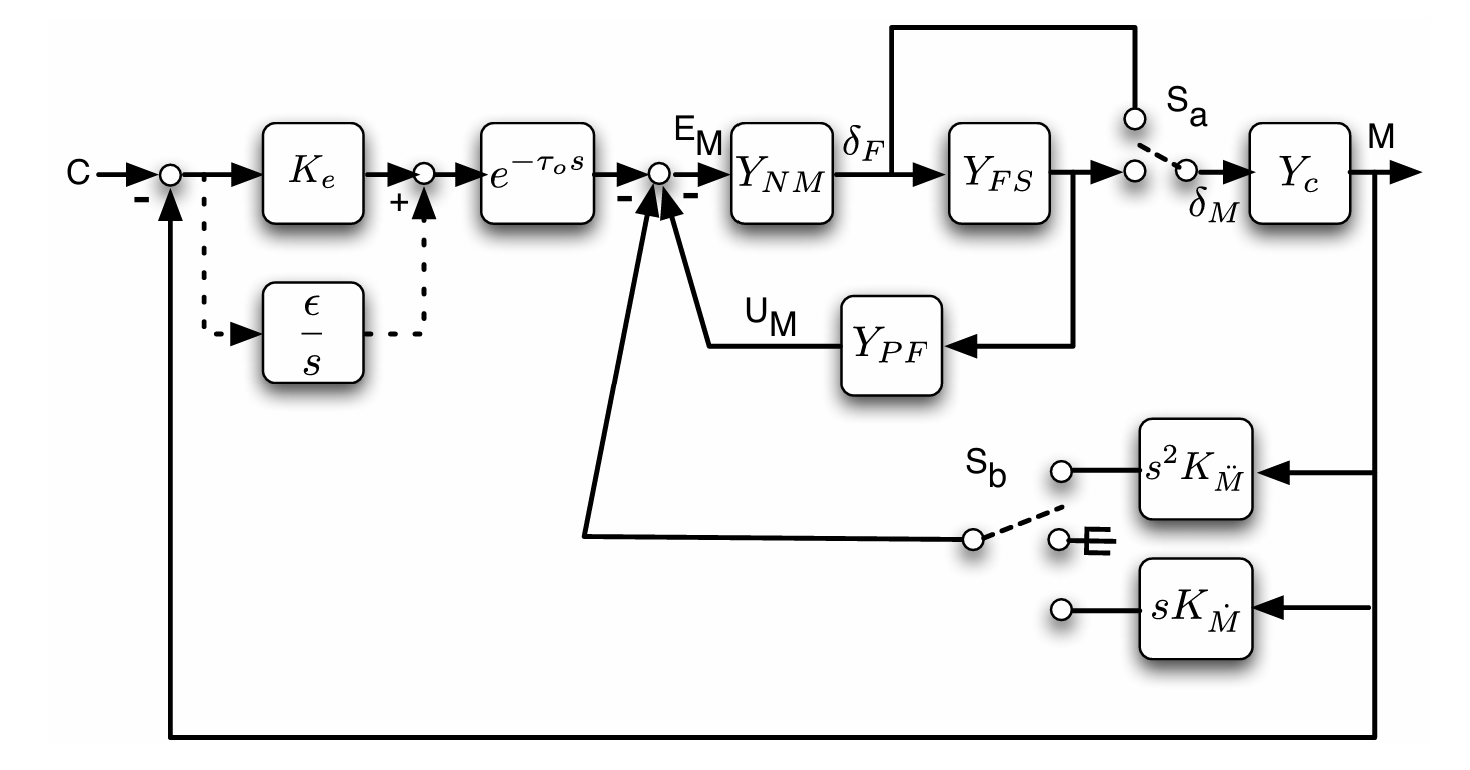
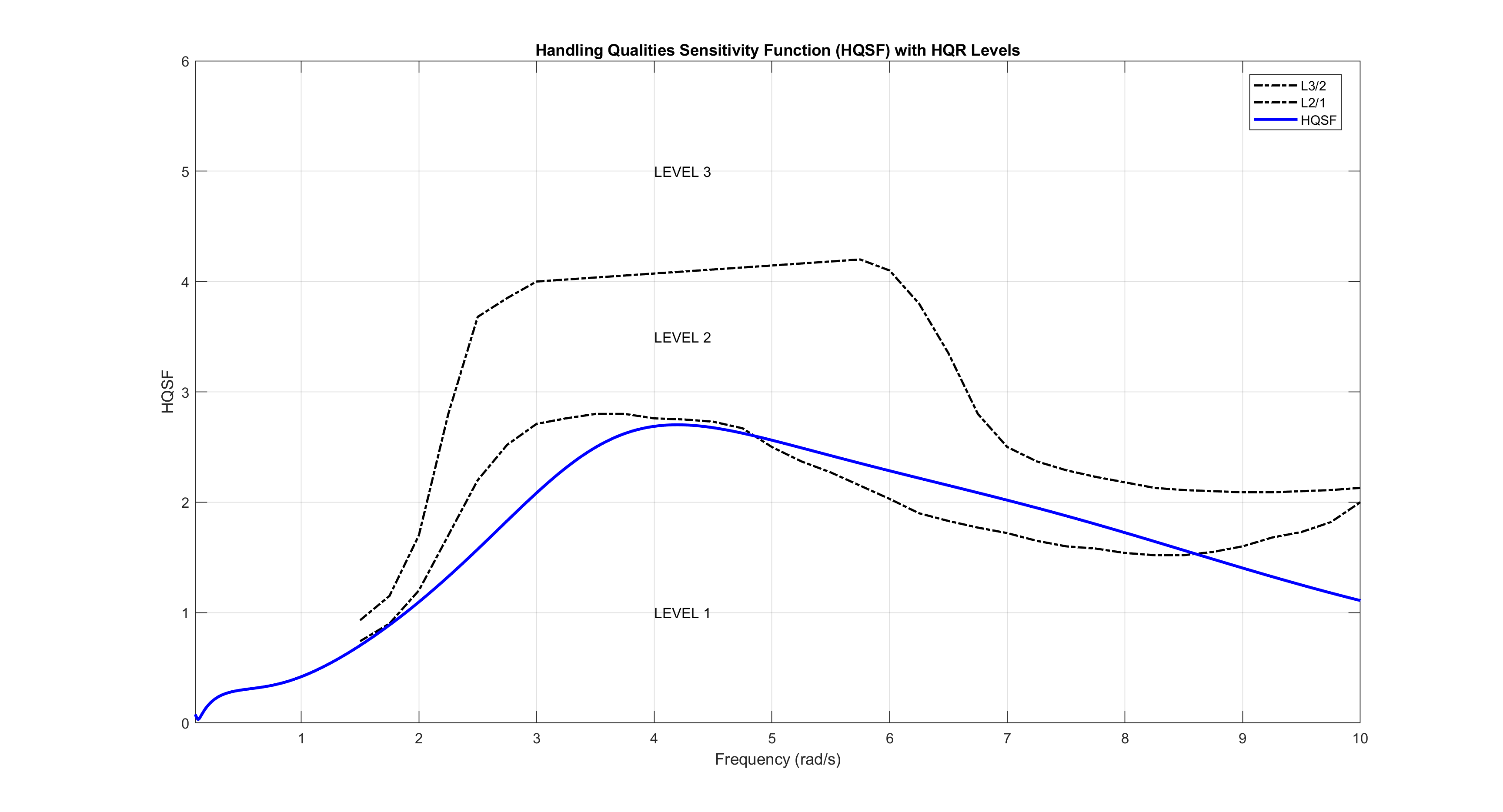
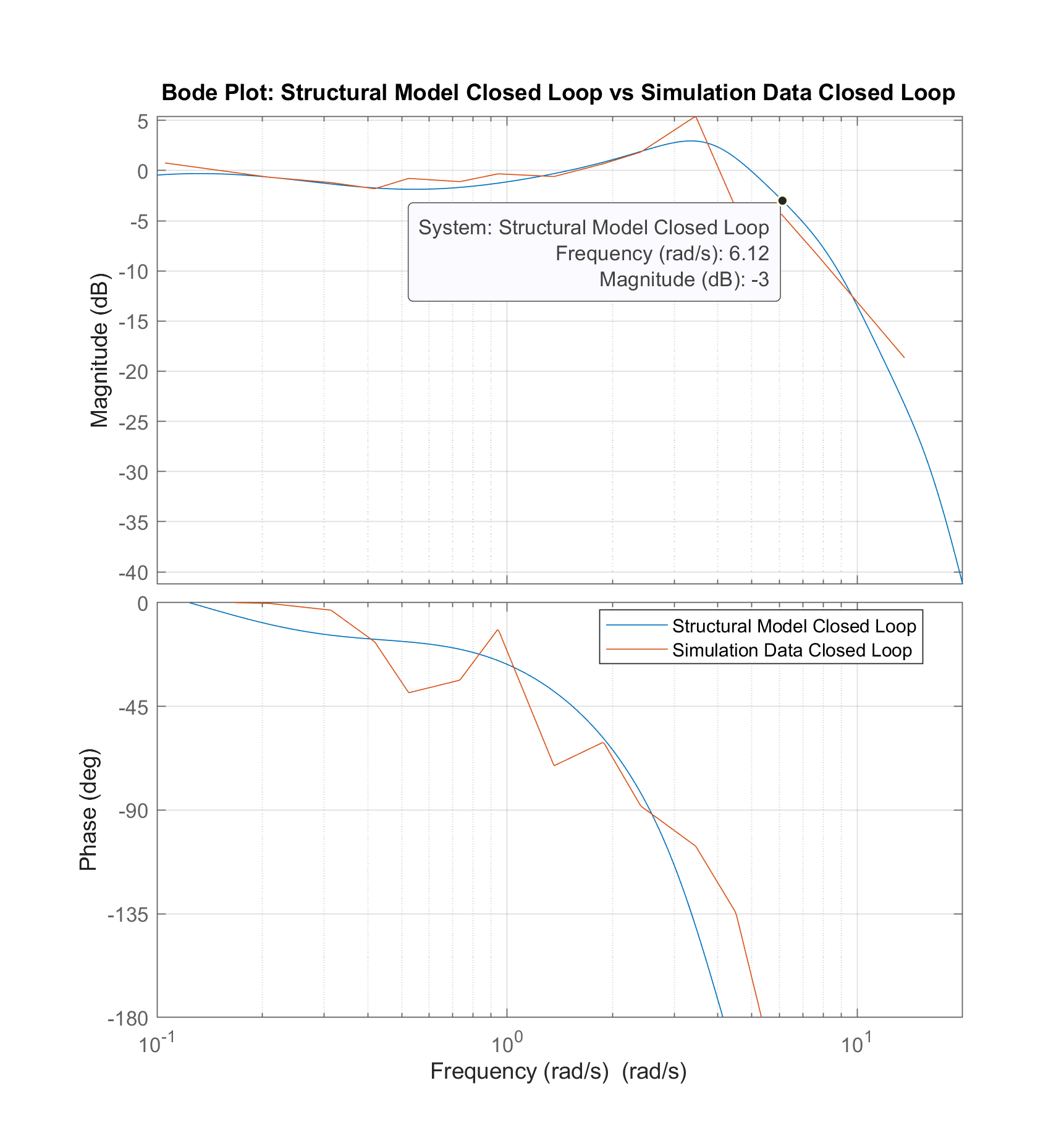
Pilot-vehicle dynamics in the loop: neuromuscular response, force and proprioceptive feedback, vestibular sensing through motion, and how those combine into a handling-quality outcome. The Hess structural pilot model — the F1 block diagram — is the backbone. Bode-fit assignments compared the modelled closed loop against simulator-data runs; later assignments swept motion / no-motion / motion-delay conditions to see how each path affected the handling-quality sensitivity function and where the loop landed against the L1 / L2 / L3 boundaries.
What carried over
The discipline that transferred is reading the artefact before asking whether the loop closed. The HQSF tells you where the pilot–aircraft loop landed against the L1 / L2 / L3 boundaries; the structural-model fit tells you whether the model is doing the work or just absorbing the residual. Both habits move sideways without changing shape — the residual histogram on a CFD case asks the same question, a formation rejoin asks it again, and none of them like being assumed.
The other piece is calibration of where motion enters the loop. The no-motion / motion / motion-delay sweeps in the coursework made the sensitivity of a handling-quality outcome to a single feedback channel visible at chart scale. That intuition — small change, one channel, real consequence — is the same one that says a boundary closure on a high-order scheme has to be earned, not assumed.